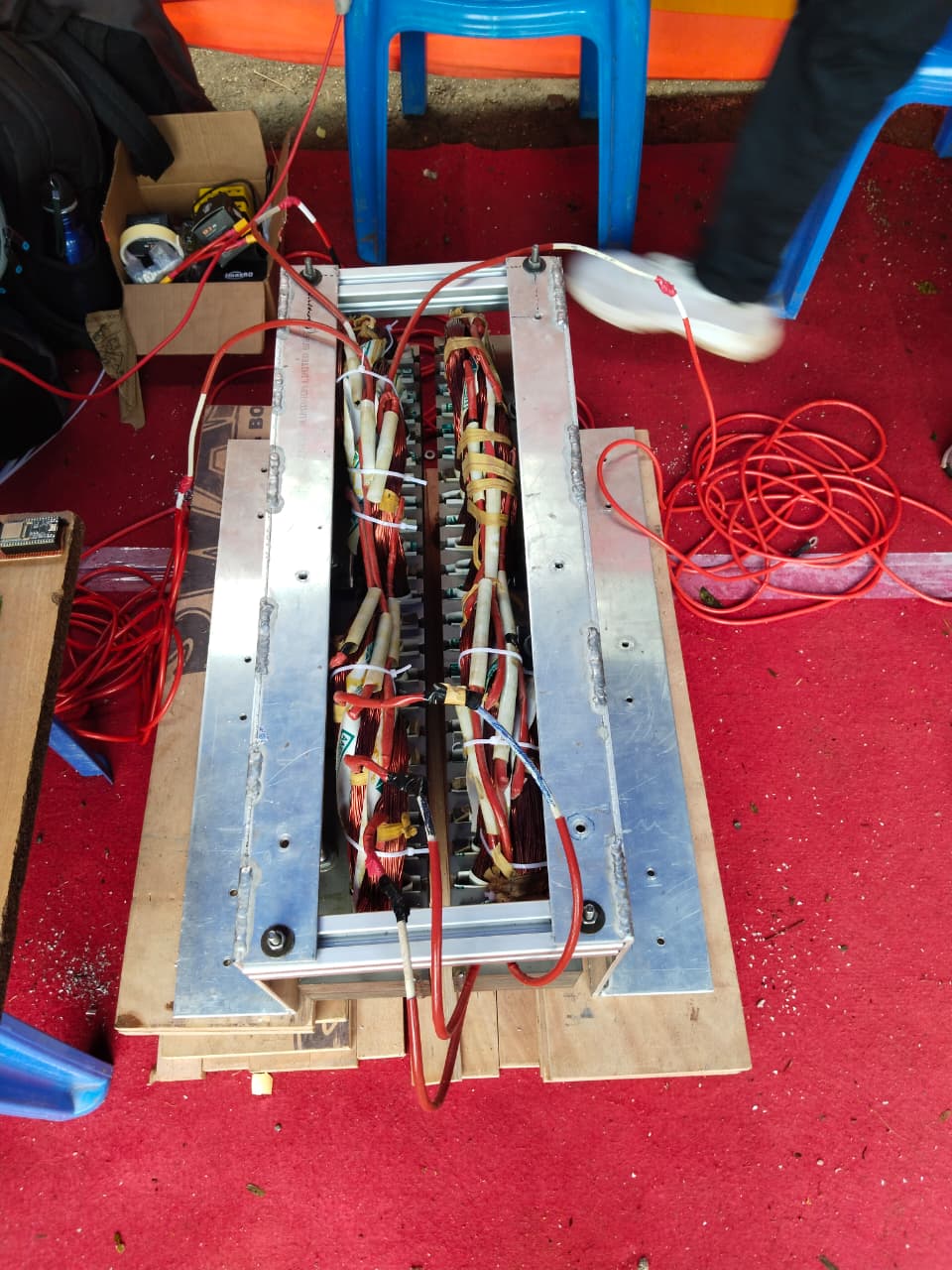
Double Sided Linear Induction Motor
A Double-Sided Linear Induction Motor (DLIM) is an advanced propulsion system that generates linear motion directly without requiring rotary-to-linear conversion. By placing conductive reaction plates between two stator assemblies, the motor produces a symmetric electromagnetic field. Improving thrust efficiency and reducing mechanical losses. This configuration ensures better force distribution, enhanced stability, and minimal wear. This makes it ideal for high-speed transportation systems such as Hyperloop and maglev applications.
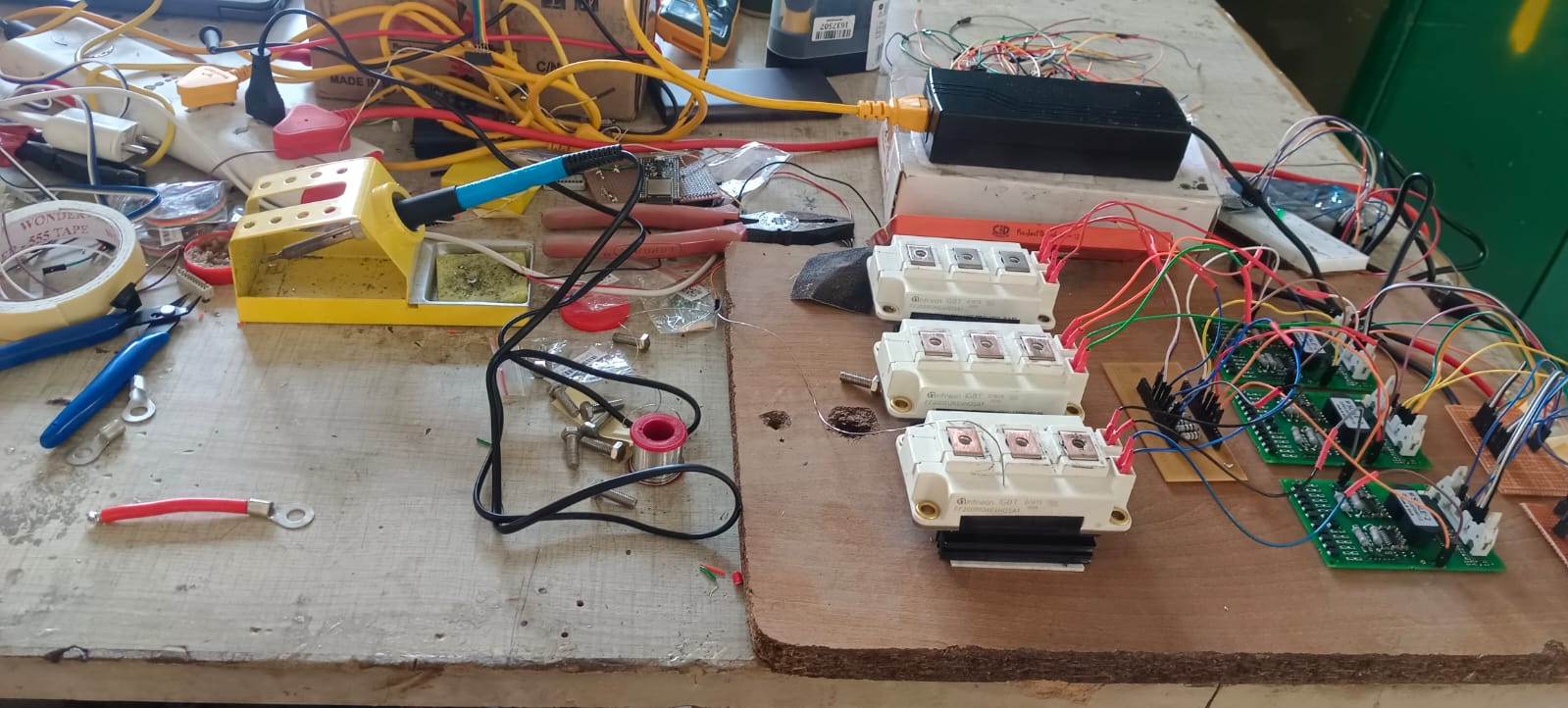
Three-Phase SPWM Inverter (VFD)
The Three-Phase Sinusoidal Pulse Width Modulation (SPWM) Inverter, commonly implemented within a Variable Frequency Drive (VFD), is responsible for converting DC power into a controlled AC output. By modulating pulse widths to approximate a sinusoidal waveform, it enables precise control over motor speed and torque while minimizing harmonic distortion. This ensures efficient power delivery, smoother motor operation, and improved energy utilization in high-performance electric propulsion systems.
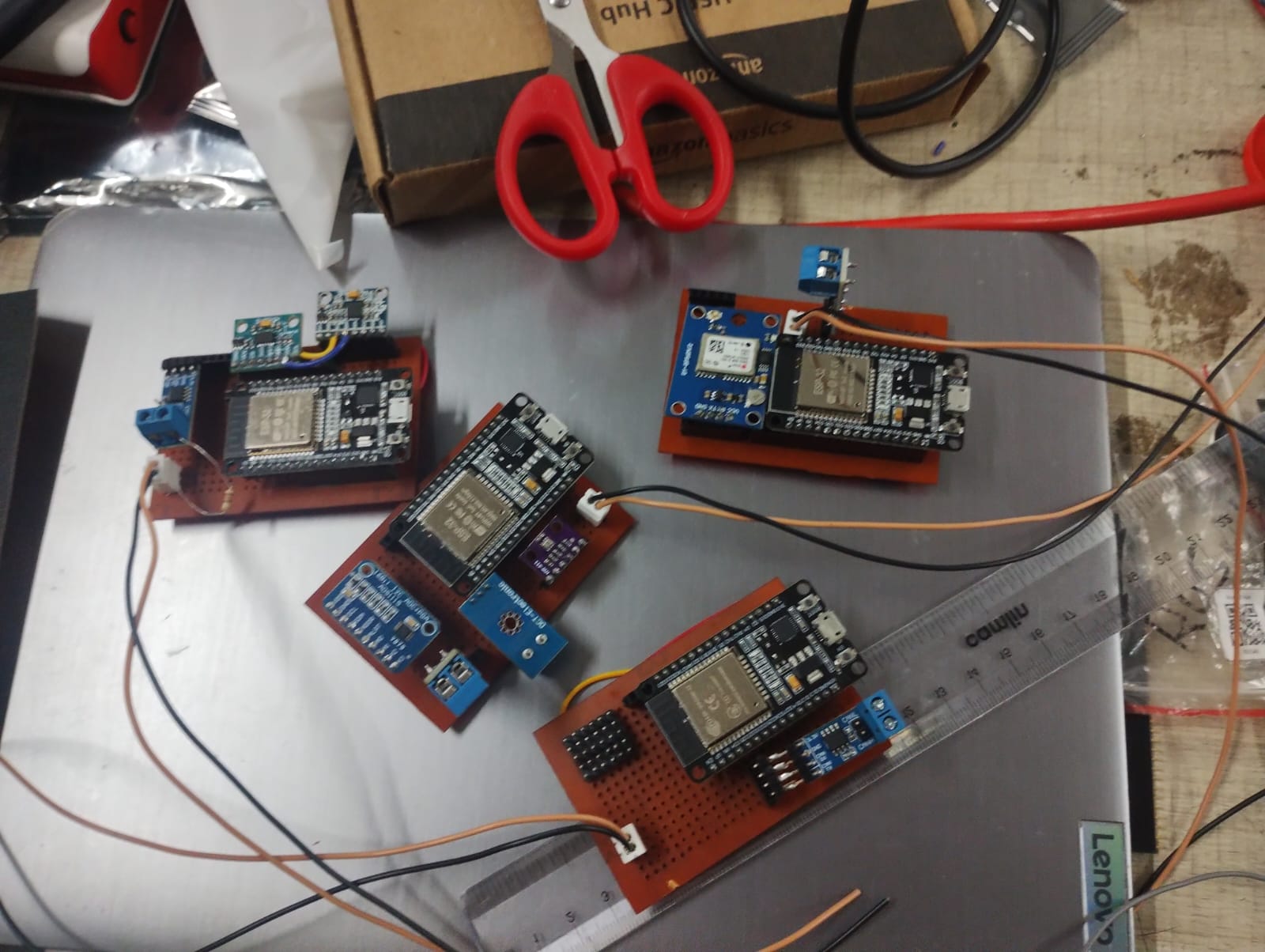
Controller Area Network (CAN)
For CAN(Controller Area Network) we have integrated IoT Node using ESP32 with Various Sensors combining them with other IoT nodes over a 2 wire half duplex Network. The master controller we have used is raspberry Pi which has a custom firmware for communicating bus.
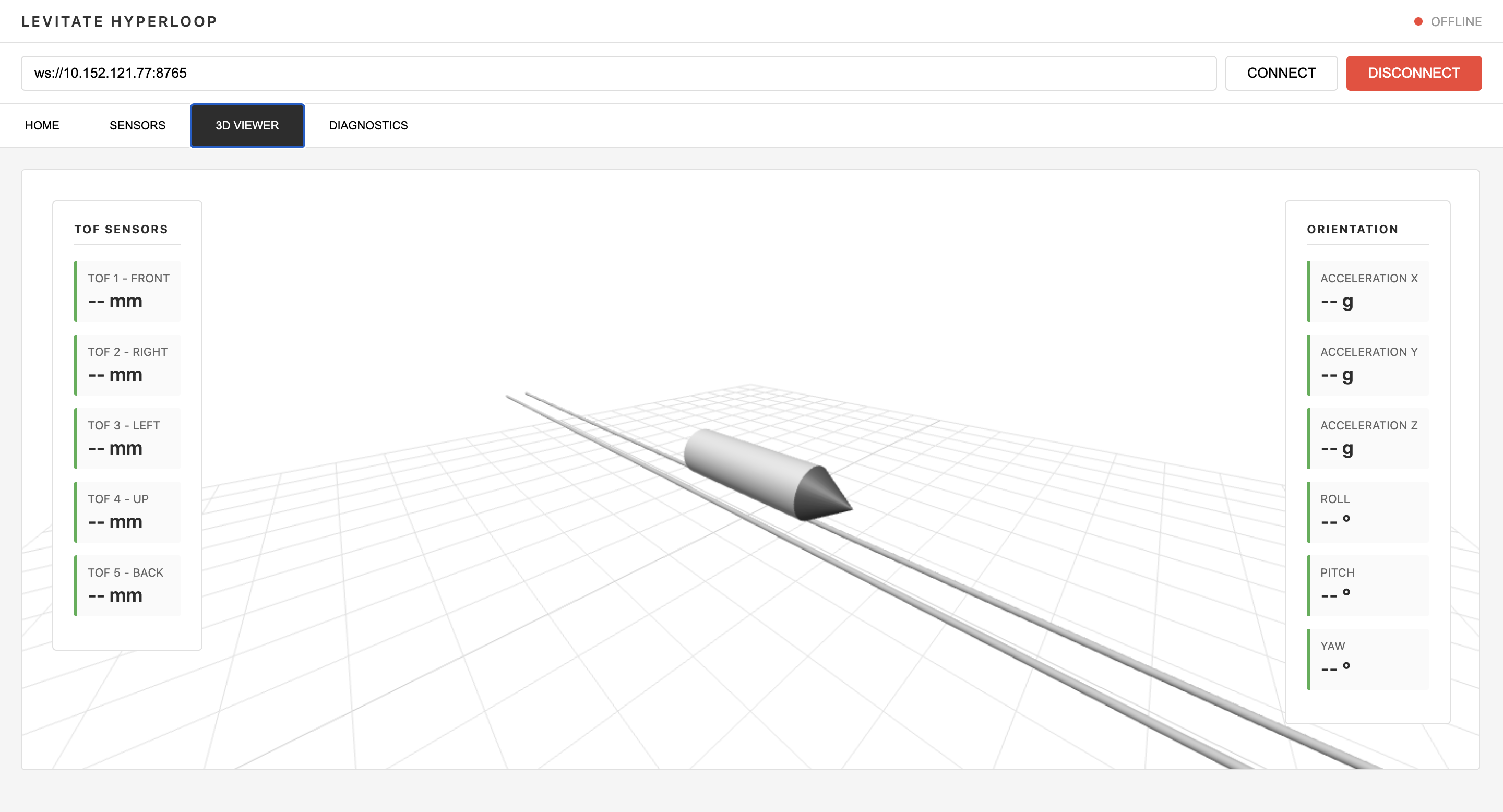
Control Panel
Click the logo to access the Control Panel
The Control Panel is the central hub for managing and monitoring the Hyperloop pod's systems. It provides a user-friendly interface for operators to control various functions, view real-time data, and respond to system alerts. The panel integrates seamlessly with the pod's communication network, ensuring efficient coordination and operation of all subsystems.